Data Mining
Intro
- Good representation:
- Low intra‐class variability
- Low inter‐class similarity
- Good representation: Simple model (classifier) more important in real application
- Bad representation: Complex model
- Histograms
- Probability Densities
- Bias and Variance
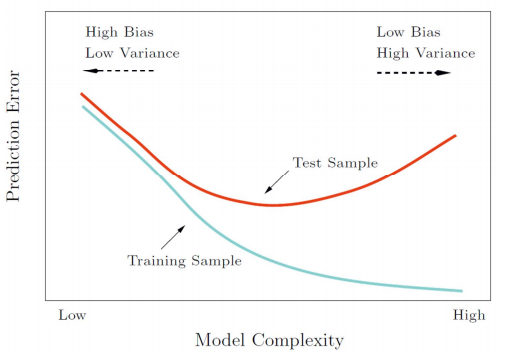
- Generalization of the classifier (model) The performance of the classifier on test data
Bayesian
-
Bayes' Theorem: $$ P(A|B) = \frac{P(B\mid A)P(A)}{P(B)} $$
-
Decision rule with only the prior information Decide $\omega_1$ if $P(\omega_1)\gt P(\omega_2)$, otherwise decide $\omega_2$
-
Likelihood $P(x\mid \omega_j)$is called the likelihood of $\omega_j$ with respect to $x$; the category $\omega_j$ for which $P(x\mid \omega_j)$ is large is more likely to be the true category
-
Maximum likelihood decision Assign input pattern $x$ to class $\omega_1$ if $P(x \mid \omega_1) > P(x \mid \omega_2),$ otherwise $\omega_2$
-
Posterior $$ P(\omega_i\mid x)=\frac{P(x\mid \omega_i)P(\omega_i)}{P(x)}\ P(x)=\sum_{i=1}^{k}{P(x\mid \omega_i)P(\omega_i)} $$ Posterior = (Likelihood × Prior) / Evidence
-
Optimal Bayes Decision Rule Decision given the posterior probabilities, Optimal Bayes Decision rule Assign input pattern $x$ to class $\omega_1$ if $P(\omega_1 \mid x) > P(\omega_2 \mid x),$ otherwise $\omega_2$ Bayes decision rule minimizes the probability of error, that is the term Optimal comes from. $$ P(error\mid x) = \min{\left{P(\omega_1\mid x),P(\omega_2\mid x)\right}} $$
-
Special cases:
- if $P(\omega_1)=P(\omega_2)$, decide $\omega_1$ if $P(x\mid \omega_1)\gt P(x\mid \omega_2)$, otherwise $\omega_2$. (MLD)
- if $P(x\mid \omega_1) = P(x\mid \omega_2)$, decide $\omega_1$ if $P(\omega_1)\gt P(\omega_2)$, otherwise $\omega_2$.
-
Bayes Risk
- Conditional risk $\alpha_i$ is action and $\lambda(\alpha_i\mid \omega_i)$ is he loss incurred for taking action $\omega_i$ when the true state of nature is $\omega_j$. $$ R(\alpha_i \mid \boldsymbol{x}) = \sum_{j=1}^{c}{\lambda(\alpha_i\mid \omega_j)P(\omega_j\mid \boldsymbol{x})} $$
- Bayes Risk $$ R=\sum_{\boldsymbol{x}}{R(\alpha_i\mid \boldsymbol{x})} $$
- Minimum Bayes risk = best performance that can be achieved
-
Likelihood Ratio if $$ \frac{P(\boldsymbol{x}\mid\omega_1)}{P(\boldsymbol{x}\mid\omega_2)}\gt \frac{\lambda_{12}-\lambda_{22}}{\lambda_{12}-\lambda_{11}} \times \frac{P(\omega_2)}{P(\omega_1)} $$ decide $\omega_1$. "If the likelihood ratio exceeds a threshold value that is independent of the input pattern x, we can take optimal actions"
-
Minimum Error Rate Classification $$ R(\alpha_x\mid \boldsymbol{x}) = 1-P(\omega_i\mid \boldsymbol{x}) $$ Minimizing the risk → Maximizing the posterior $P(\omega_i\mid \boldsymbol{x})$
-
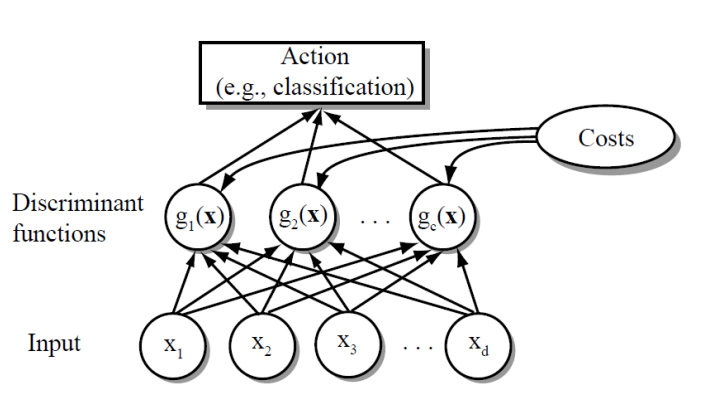
Network Representation of a Classifier
-
Bayes Classifier $$ g_i(\boldsymbol{x}) = P(\boldsymbol{x}\mid \omega_i)P(\omega_i)\ g_i(\boldsymbol{x}) = \ln{P(\boldsymbol{x}\mid \omega_i)}+\ln{P(\omega_i)} $$
-
Binary classification → Multi‐class classification
- One vs. One
- One vs. Rest
- ECOC
-
Normal Distribution $\cal{N}(\boldsymbol{\mu}, \Sigma)$(with dimension $d$) $$ P(\boldsymbol{x})= \frac{1}{\left(2\pi\right)^{\frac{d}{2}}\left|\Sigma\right|^{\frac{1}{2}}}{\exp{\left[-\frac{1}{2}\left(\boldsymbol{x}-\boldsymbol{\mu}\right)^T\Sigma^{-1}\left(\boldsymbol{x}-\boldsymbol{\mu}\right)\right]}} $$
-
Maximum‐Likelihood Estimation
- Gradient operator $$ \nabla_{\theta}=\left[\frac{\partial}{\partial\theta_1},\cdots,\frac{\theta}{\partial\theta_p}\right] $$
- Optimal Estimation $$ \nabla_\theta l=\sum_{k=1}^{n}\ln{P(x_k\mid\theta)}=0 $$
-
Gaussian with unknown $\mu$ and $\Sigma$ $$ \boldsymbol{\hat{\mu}}=\frac{1}{n}\sum_{k=1}^{n}\boldsymbol{x}k\ \boldsymbol{\hat{\Sigma}}=\frac{1}{n}\sum{k=1}^{n}{\left(\boldsymbol{x}_k-\boldsymbol{\hat{\mu}}\right)\left(\boldsymbol{x}_k-\boldsymbol{\hat{\mu}}\right)^T} $$
-
Bayesian Estimation $$ P(\omega_i\mid \mathbf{x}, \mathcal{D})=\frac{p(\mathbf{x}\mid \omega_i, \mathcal{D}i)P(\omega_i)}{\sum{j=1}^c{p(\mathbf{x}\mid \omega_j, \mathcal{D}_j)P(\omega_j)}} $$ where $$ p(x\mid D)=\int{p(x,\theta\mid D)d\theta}=\int{p(x\mid\theta, D)p(\theta\mid D)d\theta}\ =\int{p(x\mid \theta)p(\theta\mid D)d\theta} $$ $P(x\mid D)$ is the central problem of Bayesian learning.
- General Theory
$P(x \mid D)$ computation can be applied to any situation in which the unknown density can be parameterized: the basic assumptions are:
- The form of $P(x \mid\theta)$ is assumed known, but the value of $\theta$ is not known exactly
- Our knowledge about $\theta$ is assumed to be contained in a known prior density $P(\theta)$
- The rest of our knowledge about $\theta$ is contained in a set D of n random variables $x_1, x_2, \dots, x_n$ that follows $P(x)$
- General Theory
$P(x \mid D)$ computation can be applied to any situation in which the unknown density can be parameterized: the basic assumptions are:
-
Linear Discriminant Analysis Covariance matrices of all classes are identical but can be arbitrary $$ g_i(x)=\mu_i^T\Sigma^{-1}x-\frac{1}{2}\mu_i^T\Sigma^{-1}\mu_i+\ln{P(\omega_i)} $$
- Estimating Parameters:
- $\mu_i$ $$ \mu_i=\frac{1}{N_i}\sum_{j\in\omega_i}x_j $$
- $P(\omega_i)$ $$ P(\omega_i)=\frac{N_i}{N} $$
- $\Sigma$ $$ \Sigma=\sum_{i=1}^c\sum_{j\in\omega_i}\frac{\left(\boldsymbol{x}_j-\boldsymbol{\mu_i}\right)\left(\boldsymbol{x}_j-\boldsymbol{\mu_i}\right)^T}{N_i} $$
- Estimating Parameters:
-
Error Probabilities and Integrals $$ P(error)=\int_{R_2}{p(x\mid\omega_1)P(\omega_1)dx}+\int_{R_1}{p(x\mid\omega_2)P(\omega_2)dx} $$
-
Naive Bayes Classifier $$ P(\omega\mid x_1,\dots,x_p)\propto P(x_1,\dots, x_p\mid \omega)P(\omega)\ P(x_1,\dots,x_p\mid \omega)=P(x_1\mid \omega)\cdots P(x_p\mid \omega) $$
-
Smoothing $$ P(x_i\mid \omega_k)=\frac{\left|x_{ik}\right|+1}{N_{\omega k}+K} $$
Perception
- Perceptron
$$
f(x)=w^Tx+w_0\
y=sign(f(x))
$$
- Learn
- If correct, do nothing
- If wrong, $w_t=w_{t-1}+xy$
- Learn
- Perceptron Criterion Function $$ E(w)=-\sum_{i\in I_M}w^Tx_iy_i $$
- Gradient Descent (Steepest descent) $$ x_{n+1}=x_n-\gamma\nabla f(x_n),n\geqslant0 $$ Let $J(w)$be the criterion function. $$ w(k+1)=w(k)-\eta(k)\nabla J(w(k)) $$
- Batch learning vs. Online learning
- Batch learning All the training samples are available
- Online learning The learning algorithm sees the training samples one by one.
- Perceptron Convergence
- converge if the data is linearly separable.
- infinite loop if the training data is not linearly separable
Linear Regression
- Polynomial Curve Fitting $$ f(x, a)=\sum_{j=0}^M{a_jx^j}\ MSE(a)=\frac{1}{n}\sum_{i=1}^n{(y_i-f(x_i, a))^2}\ RSS(a)= \sum_{i=1}^n{(y_i-f(x_i, a))^2} $$
- Linear Regression Model
$$
J_n(a)=(y-X^Ta)^T(y-X^Ta)
$$
- Gradient Descent $$ a_{k+1}=a_k+\eta_k2X(X^Ta-y) $$
- fitted values $$ \hat{y}=X^Ta=X^T(XX^T)^{-1}Xy $$
- Statistical model of regression
- A generative model: $y=f(x,a)+\epsilon$, where $\epsilon\sim N(0,\sigma^2)$. The maximum likelihood estimation result is approximate to RSS.
- Overfitting if $XX^T$$ is singular, overfitting.
- Ridge Regression $$ a^\star = argmin{\sum_{i=1}^n{(y_i-f(x_i, a))^2}+\lambda\sum^p_{j=1}a_j^2}\ a^\star=(XX^T+\lambda I)^{-1}Xy $$
- Maximum Likelihood Estimation If the prior is chosen as: $$ p(a)=\mathcal{N}(a\mid 0, \lambda^{-1}I) $$ then it's also a ridge regression.
- Bias‐variance Decomposition Expected prediction error (expected loss) = (bias)²+variance+noise
- The Bias‐Variance Trade‐off
- Over‐regularized model (large λ) → high bias
- Under‐regularized model (small λ)→ high variance
- LASSO
- Using one norm as regularization
- Sparse model
Logistic Regression
- Sigmoid function $$ \sigma(t)=\frac{1}{1+e^{-t}} $$
- Logistic Regression $$ P(y_i=\pm1\mid x_i, a)=\frac{1}{1+e^{-y_ia^Tx_i}} $$
- Criterion function $$ E(a)=\sum_{i\in I}{\log(1+e^{-y_ia^Tx_i})} $$
SVM
- Geometrical Margin $$ \gamma = y\frac{w^Tx+b}{\left|w\right|} $$
- Maximum Margin Classifier
- Maximize the confidence of classifying the dataset
- Criterion function let $w^Tx+b=1$. $$ \min_{w,b}{\left|w\right|}\ \Rightarrow \min_{w,b}{\frac{1}{2}\left|w\right|^2}\ s.t. y_i(w^Tx+b)\geqslant 1 $$
- Support Vectors $$ y_i(w^Tx+b) = 1 $$
- Weakness of the Original Model
- When an outlier appear, the optimal hyperplane may be pushed far away from its original/correct place.
- Assign a slack variable $\xi$ to each data point. That means we allow the point to deviate from the correct margin by a distance of $\xi$
- New Objective Function $$ \min_{w,b}{\frac{1}{2}\left|w\right|^2 + C\sum_{i=1}^n{\xi_i}}\ s.t. y_i(w^Tx+b)\geqslant 1-\xi_i\ \xi_i\geqslant0 $$
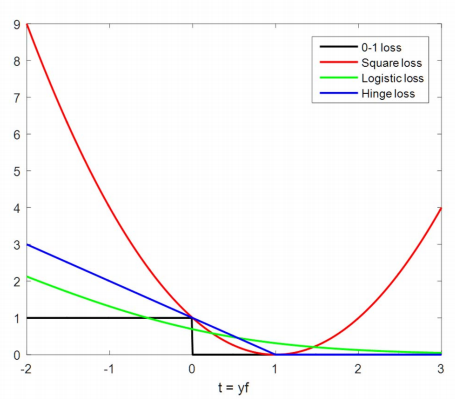
- Hinge loss $$ \max{\left[1-y(w^Tx_i+b),0\right]}+\frac{1}{2C}\left|w\right|^2 $$
- A General formulation of classifiers
- optimize function $$ \min_f\left{\sum_{i=1}^n{\mathcal{l}(f)+\lambda R(f)}\right} $$
- loss
Kernel
- Quadratic Discriminant Function $$ g(x)=w_0+\sum_{i=1}^d{w_ix_i}+\sum_{i=1}^d\sum_{j=1}^d{w_{ij}x_ix_j} $$ $g(x)=0$ represents a hyperquadric.
- Generalized Discriminant Function $$ g(x)=\sum_{i=1}^{\hat{d}}{a_iy_i(x)} $$ and $\mathbf{y}=[y_i]$ is called augmented feature vector. The element function is called the phi‐function.
- Representer Theorem ... admits a representation of form: $$ f(x)=\sum_{i=1}^m{\alpha_ik(x_i,x)} $$
- Kernelized Ridge Regression $$ \alpha = (X^TX+\lambda I)^{-1}y\ \hat{f}(x)=\sum_{i=1}^n{\alpha_ik(x_i,x)}\ k(x_i, x)=w^Tx=x^T_ix $$
- Kernels
Let $k(x,x') \geqslant0$ be some measure of similarity between objects $x,x'\in \mathcal{X}$ where $\mathcal{X}$ is some abstract space; we will call $k$ a kernel function.
- Typically the function is symmetric, and non‐negative
- Linear kernels: $k(x,x')=x^Tx'$
- Polynomial kernels: $k(x,x')=)x^Tx'+1)^d$
- RBF kernels: $k(x,x')=\exp{\left(-\frac{\left|x-x'\right|}{2\sigma^2}\right)}$
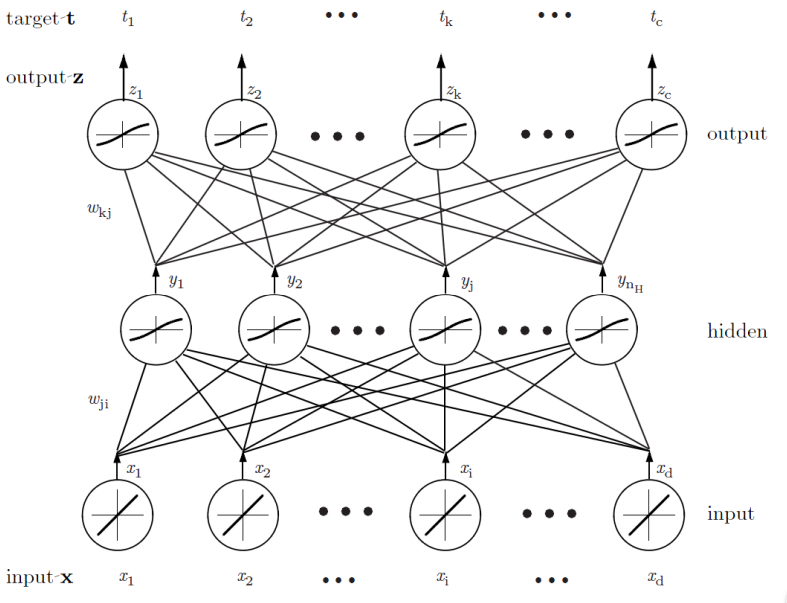
Neural Networks
- In using the multilayer neural Networks, the form of the nonlinearity is learned from the training data
- Multilayer neural network implements linear discriminants, but in a space where the inputs have been mapped nonlinearly
- Any continuous function from input to output can be implemented in
a three‐layer net, given sufficient
number of hidden units n
H, proper nonlinearities, and weights - Backpropagation Algorithm
 $$
\frac{\partial J}{\partial net_k}\cdot \frac{\partial net_k}{\partial w_{kj}}=-\delta_k\frac{\partial net_k}{\partial w_{kj}}\
\Delta w_{kj}=\eta\delta_ky_j
$$
$$
\frac{\partial J}{\partial net_k}\cdot \frac{\partial net_k}{\partial w_{kj}}=-\delta_k\frac{\partial net_k}{\partial w_{kj}}\
\Delta w_{kj}=\eta\delta_ky_j
$$
- Stochastic: patterns are chosen randomly from training set; network weights are updated for each pattern
- For each hidden unit, the weights from input layer describe the input pattern that leads to the maximum activation of that node
kNN & Decision Tree
- kNN Classifier
- Use class labels of nearest neighbors to determine the class label of unknown record (e.g., by taking majority vote)
- Effective number of parameters:$\frac{N}{K}$
- Decision Tree
- A hierarchical data structure that represents data by implementing a divide and conquer strategy
- Finding the minimal decision tree consistent with the data is NP‐hard
- Entropy
$$
Entropy(S)=-\sum_{i=1}^c{P_i\log{P_i}}
$$
- If all the examples belong to the same category, Entropy=0
- If the examples are equally mixed (0.5,0.5), Entropy=1
- Information Gain
- The information gain of an attribute a is the expected reduction in entropy caused by partitioning on this attribute. $$ Gain(S,a)=Entropy(S)-\sum_{v\in values(a)}{\frac{\left|S_v\right|}{\left|S\right|}Entropy(S_v)} $$ where $S_v$ is the subset of $S$ for which attribute $a$ has value $v$.
- ID3 Choose the best attribute (highest gain)
Ensemble & Random Forest
-
The Bagging Algorithm
- Bootstrap sampling: re‐sample ܰN examples from D uniformly with replacement
- Aggregating: adopts the most popular strategies for aggregating the outputs of the base learners, that is, voting for classification and averaging for regression.
- bagging works reasonably well if base algorithm sensitive to data randomness
- Variance is smaller: $$ \rho\sigma^2=\frac{1-\rho}{T}\sigma^2 $$ where T is smaples number, $\rho$ is correlation.
- The base learner should aware the little change, sometimes overfitting is allowable
-
Random Forest
- uses decision tree as basic unit in bagging, is an ensemble model.
- The main difference between the method of RF and Bagging is that RF incorporate randomized feature selection at each split step. $\sqrt{k}$ in classification and $k/3$ in regression.
-
Boosting
- Training base learners by assigning different weights to the samples. $$ \min_f\left{\sum_{i=1}^n{w_i\mathcal{l}(f)+\lambda R(f)}\right} $$
-
AdaBoost
- $w_n^{(1)}=1/N$, for $n=1,\dots,N$.
- For $m=1,\dots,M$:
- Fit a classifier $y^{(m)}(x)$ to the training data by minimizing the weighted error function. $$ J_m=\sum_{n=1}^N{w_n^{(m)}I(y^{(m)}(x_n)\neq t_n)} $$
- Evaluate the Errorrate: $$ \epsilon_m=\frac{\sum_{n=1}^N{w_n^{(m)}I(y^{(m)}(x_n)\neq t_n)}}{\sum_{n=1}^N{w_n^{(m)}}} $$ and then use this to evaluate $$ \alpha_m=\ln{\frac{1-\epsilon_m}{\epsilon_m}} $$
- the data weighting coefficients $$ w_n={(m+1)}=w_n^{(m)}\exp{\left{\alpha_mI(y^{(m)}(x_n)\neq t_n)\right}} $$
- Make predictions using the final model, which is given by $$ Y_M(x)=sign\left(\sum_{m=1}^M{\alpha_my^{(m)}(x)}\right) $$
weighting coefficients give greater weight to the more accurate classifiers when computing the overall output In each round, the algorithm try to get a different base learner, so that model diversity is achieved. $$ \frac{\sum_{n=1}^N{w_n^{(m+1)}I(y^{(m+1)}(x_n)\neq t_n)}}{\sum_{n=1}^N{w_n^{(m)}}}=\frac{1}{2} $$
-
Optimization of Exponential Loss $$ E=\sum^N_{n=1}\exp{\left{-t_nf_m(x_n)\right}}, f_m(x)=\frac{1}{2}\sum_{i=1}^m{\alpha_ly_l(x)},t_n\in[-1,1] $$
Clustering
-
K-means Given k, the k‐means algorithm is implemented in four steps:
- Partition objects into k nonempty subsets
- Compute seed points as the centroids of the clusters of the current partitioning
- Assign each object to the cluster with the nearest seed point
- Go back to Step 2, stop when he assignment does not change
-
K-Medoids Instead of taking the mean value of the object in a cluster as a reference point, medoids can be used, which is the most centrally located object in a cluster.
-
Partitioning Around Medoids (PAM) Calculate the pair‐wise distance matrix W first.
-
Gaussian Mixture Model $$ p(x;\Theta)=\sum_{k=1}^K{\pi_kp_k(x;\theta_k)}\ \Theta=\left{\pi_1, \dots, \pi_k, \theta_1, \dots, theta_k\right}, \sum{\pi_k}=1\ p_k(x;\theta_k)=\mathcal{N}(x;\mu_k;\Sigma_k) $$ For each point $x^{(i)}$, $z^{(i)}$ associate with a hidden variable denotes $x^{(i)}$ which Gaussian $x^{(i)}$ belongs to
-
EM algorithm $$ L(\theta)=\sum_{i=1}^m{\log{\sum_{z_{(i)}}{p(x^{(i)},z^{(i)};\theta)}}}\ =\sum_{i=1}^m{\log{\sum_{z_{(i)}}{Q^i(z^{i})\frac{p(x^{(i)},z^{(i)};\theta)}{Q^i(z^{i})}}}}\ \geqslant\sum_{i=1}^m{Q^i(z^{i})\sum_{z_{(i)}}{\log{\frac{p(x^{(i)},z^{(i)};\theta)}{Q^i(z^{i})}}}}=l(\theta) $$ Note that $f(x)=\log(x)$is a concave function and by Jensenʹs inequality, we have: $$ f\left(E_{z^{(i)}\sim Q}\left[\frac{p(x^{(i)},z^{(i)};\theta)}{Q^i(z^{i})}\right]\right)\geqslant E_{z^{(i)}\sim Q}\left[f\left(\frac{p(x^{(i)},z^{(i)};\theta)}{Q^i(z^{i})}\right)\right] $$ where the $z^{(i)}\sim Q$ subscripts above indicate that the expectations are with respect to $z^{(i)}$ drawn from $Q$. we'll make the inequality above hold with equality at our particular value of $\theta$.(E-step) $$ Q^i(z^{(i)})=p(z^{(i)}\mid x^{(i)};\theta) $$ So the fraction is constant that does not depend on $z^{(i)}$ $$ L(\theta_{n+1})\geqslant l_n(\theta_{n+1})\geqslant l_n(\theta_{n}=L(\theta_n) $$ Where $l_n(\theta_{n+1})$ means the lower‐bound function is computed with $Q_n$ parameterized by $\theta_{n+1}$. $l_n(\theta_{n+1})\geqslant l_n(\theta_{n})$ because $\theta_{n+1}=\arg\max_{\theta}l_n(\theta)$. In GMM, with $P(z^{(i)}=k)=\frac{\sum_k{Q_k^{(i)}}}{n}=\pi_k$. Q can be obtained by bayesian theorem.
-
Spectral Clustering
- Represent data points as the vertices V of a graph G.
- All pairs of vertices are connected by an edge E.
- Edges have weights W. Large weights mean that the adjacent vertices are very similar; small weights imply dissimilarity
Divide vertices into two disjoint groups (A,B). Minimize weight of between‐group connections. $$ cut(A, B)= \sum_{i\in A, j\in B}{w_{ij}}\ assoc(A,V)=\sum_{i\in A, j\in V}{w_{ij}}\ \min Ncut(A, B)=\frac{cut(A,B)}{assoc(A,V)}+\frac{cut(A,B)}{assoc(B,V)} $$
- Represent data points as the vertices V of a graph G.
-
Objective Function of Ncut $$ D=[d_{ij}], d_{ii}=\sum_{j}{w_{ij}}\ \min_{y}{\frac{y^T(D-W)y}{y^TDy}}, y\in[2,-2b]^n, y^TD1=0 $$ where $$ k=\frac{\sum_{x_i>0}d_i}{\sum_id_i}, b=\frac{k}{1-k} $$
-
Rayleigh quotient $$ \min_{y}{\frac{y^TLy}{y^TDy}}, y\in R^n, y^TD1=0\ \Rightarrow (D-W)y=\lambda Dy $$
-
Generalized Eigen‐problem In this problem (with D and W), Vector 1 is the eigenvector corresponding to the eigenvalue 0. The eigenvector corresponding to the 2nd small eigenvalue. Each eigen vector (from small to large) of is a k dimensional representation of the original data point.
Dimensionality Reduction
$$ \mathcal{F}(x\in R^p)=z\in R^d $$ - if f is linear, linear dimensionality reduction $$ A^Tx=z $$ - Selection: choose a best **subset** of size d from the available p features - Extraction: given p features (set X), extract d new features (set Z) by linear or non‐linear combination of all the p features - PCA - Principal component analysis - Retains most of the sample's information. (large variance) - The new variables, called principal components, uncorrelated$$
\max_{a}{a^TSa}, s.t. a^Ta=1 \\
\Rightarrow Sa=\lambda a
$$ where
$$
S=\frac{1}{n}{\sum_{i=1}^n{(x_i-\bar{x})(x_i-\bar{x})^T}}
$$ is the covariance matrix.
The kth largest eigenvalue of S is the variance of kth PC.
-
Reconstruction $$ \bar{X}=A(A^TX) $$
-
Optimality Property of PCA $$ \min_{A\in R^{p\times d}}{\left|X-AA^TX\right|^2_F}, s.t. A^TA=I_d $$ X is centered data matrix.
-
LDA
- Supervised
- Linear Discriminant Analysis
- Fisher Linear Discriminant
- preserving asmuch of the class discriminatory information as possible
$$ J(a)=\frac{(\tilde\mu_1-\tilde\mu_2)^2}{\tilde{s}^2_1+\tilde{s}^2_2}=\frac{a^TS_Ba}{a^TS_Wa} $$
- within‐class scatter matrix: $S_W=S_1+S_2$.
- between‐class scatter matrix: $S_B=(\mu_1-\mu_2)(\mu_1-\mu_2)^T$
$$ S_Ba=\lambda S_Wa\ a^\star=S_W^{-1}(\mu_1-\mu_2) $$
- Multi-class $$ J(a)=\frac{a^TS_Ba}{a^TS_Wa}\ S_W=\sum_{i=1}^cS_i\ S_B=\sum_{i=1}^c{n_i(\mu_i-\mu)(\mu_i-\mu)^T} $$
-
LPP
-
Locality Preserving Projections
-
Graph W. L and D are the same as PCA.
-
Unsupervised, but it is very easy to have supervised (semi‐supervised) extensions. $$ \min{\sum_{ij}{w_{ij}(z_i-z_j)^2}}=\min{\frac{a^TXLX^Ta}{a^TXDX^Ta}}\ \Rightarrow XLX^Ta = \lambda XDX^Ta\ \Rightarrow XWX^Ta = \lambda XDX^Ta $$ when using L, smallest eigenvalue, when using W, largest eigenvalue.
-
LPP is equivalent to LDA when a specifically designed supervised graph is used
-
LPP is similar to PCA when an inner product graph is used. ($W=X^TX$)
-
Graph based Dimensionality Reduction $XWX^Ta = \lambda XDX^Ta$
-
Regularization: only max, add $\gamma I$ to the S in denominator(right side) (LDA, LPP).
-
-
Laplacian Eigenmap $$ \min{y^TLy}\s.t. y^TDy=1 $$
TopicModel
-
Document‐Term Matrix
-
Query $$ cos(q,d)=\frac{q^Td}{\left|q\right|\left|d\right|} $$
-
Polysemy: words with multiple meanings: sim < cos
-
Synonymy: separate words that have the same meaning: sim > cos
-
Language Model Paradigm $$ P(R_d=1\mid q)\propto P(q\mid R_d=1)P(R_d=1) $$
- prior probability of relevance: uniform or popularity
- query likelihood $$ P(q\mid d)=\prod_{w\in q}{P(w\mid d)} $$
-
Naive Approach $$ \hat{P}(w\mid d)=\frac{n(d,w)}{\sum_{w'}{n(d, w')}} $$
-
Probabilistic Latent Semantic Analysis $$ \hat{P}(w\mid d)=\sum_z{P(w\mid z)P(z\mid d)} $$
-
Latent Dirichlet allocation ‐ adds a Dirichlet prior on the per‐document topic distribution, trying to address an often‐criticized shortcoming of PLSA, namely that it is not a proper generative model for new documents and at the same time avoid the overfitting problem.
 粤公网安备44030002005029号
粤公网安备44030002005029号